微型機器人的生物醫用近年來引起了極大關注,尤其在傳統醫療設備難以觸及的狹窄管腔內精確藥物遞送方面表現出巨大潛力(Nelson and Pané, Science 2023, 382, 1120)。這些能夠變形并根據需要進行移動的微型機器人有望改變對人體內管腔病變,如胃腸道和血液循環系統的治療方法。由于這些機器人在人體內工作環境通常為非可視,因此,有效的定位跟蹤技術對于提供關鍵的位置信息反饋至關重要,這有助于指導機器人的精確操作和移動。鑒于此,開發用于微型機器人定位和跟蹤的新型技術已成為當前科學研究的焦點和前沿領域。這些技術的進步對于優化微型機器人在復雜人體環境中的導航和操作,以及提高治療效率和精度具有重要意義。
在微型機器人體內跟蹤領域的當前研究(O. G. Schmidt et al., ACS Nano 2020, 14, 9, 10865; W. Gao et al., Chem. Soc. Rev. 2020,49, 8088-8112; B. Wang and L. Zhang et al., Adv. Mater. 2021, 33, 2002047),涵蓋了多種成像技術,如熒光成像、磁共振成像(MRI)、超聲成像、放射性核素成像、光聲成像,以及近期發展的激光散斑成像技術(Guan, Li and Mou et al., Sc. Adv. 2023, 9, adk7251)。上述追蹤方式在處理人體內不同深度和不同器官組織中微型機器人的定位和跟蹤問題方面取得了顯著成果。
本研究提出的微型機器人跟蹤模式基于液態金屬耦合的射頻識別(RFID)技術,該技術的主要優勢在于其具有較高的跟蹤深度(最多可達10至20厘米),并且在體內骨骼和氣泡方面的干擾極小。此外,RFID技術不產生電離輻射,從而在醫療機器人領域中為微型機器人的體內追蹤提供了一種安全且有效的新策略。與其他跟蹤技術相比,本技術在追蹤過程中不需依賴任何笨重或龐大的設備,整體系統(包括筆記本電腦)的總重量不超過3公斤。這種系統的高可攜帶性和低成本特點,使其在醫療條件較差的偏遠地區具有潛在的應用價值。該技術不僅為微型機器人在人體內長距離驅動和精確定位提供了新方案,而且為藥物精準遞送提供了新思路。相關研究成果以發表在Device期刊2024年第2期,Device是Cell Press新出的器件領域旗艦期刊。論文第一作者為化學與環境工程學院本科生葉芷澄,通訊作者王奔老師。
論文鏈接:https://doi.org/10.1016/j.device.2023.100181

圖1. 在磁性致動單元和射頻識別定位系統下多足機器人的胃內遞送的示意圖
軟體機器人的多模態運動
在自然界中,眾多陸生動物和昆蟲的腿部結構使其在行進或奔跑時能夠減少摩擦、增加運動自由度并有效降低能量消耗。基于對這一生物學特性的研究和模仿,科學家們開發了多軟足微型機器人,這種機器人設計能夠適應胃腸道等人體內復雜地形,并減少與組織表面的附著力(Shen and Wang et al., Nat. Commun. 2018, 9, 3944)。借助于精確控制的磁驅動單元,這些多足機器人能夠進行形變,從而展現出多種運動模式,如沿不同軸向的卷曲、類似于潛艇的垂直浮動,以及周期性的爬行等。
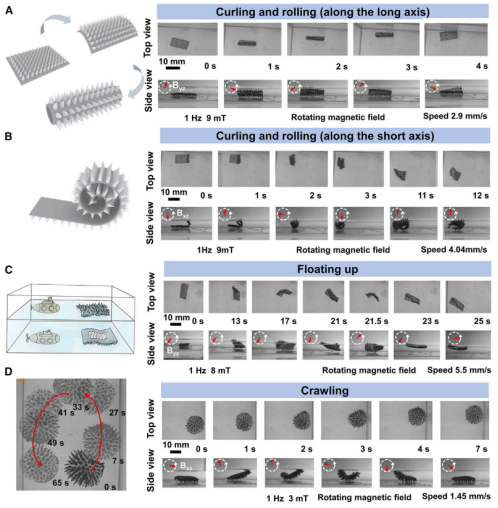
圖2. 機器人的多模態運動
RFID定位追蹤
多足機器人的實時定位與傳統高成本醫療成像設備的方法不同,它采用射頻識別(RFID)技術進行定位。該技術通過將RFID芯片集成至機器人內部,并利用磁控裝置來驅動機器人的連續移動,實現了對機器人位置的精準追蹤。移動信號檢測器接收來自RFID芯片的信號,從而在非直視環境中準確確定機器人的位置,并描繪出其運動軌跡。與傳統的大型臨床跟蹤設備相比,RFID技術在體內跟蹤深度方面可達10至20厘米,并且對于骨骼和體內氣泡的干擾極小。更重要的是,RFID技術不產生電離輻射,從而避免了相關的健康風險。同時,該技術的應用降低了醫療成本并減少了患者接受輻射的風險。RFID技術在體內微型機器人定位和跟蹤方面的應用,有望顯著提高機器人在復雜生物環境中的導航和操作精度,為醫學研究和治療領域帶來新的突破。這種新型跟蹤方法的發展和推廣將有助于提高治療的效率和安全性。
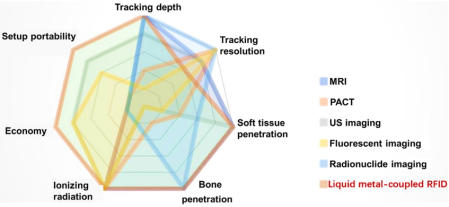
圖3. 現有主流追蹤策略和液態金屬耦合RFID定位設備的特征比較
為了系統地驗證液態金屬耦合RFID定位裝置的追蹤效能,研究團隊進行了一系列定量實驗,這些實驗考察了在不同條件下RFID檢測信號的性能。具體包括:在多足機器人與RFID檢測器之間不同的距離、存在不同類型障礙物情況下,以及機器人相對于檢測傳感器的不同法線方向和傾角下的信號響應。實驗結果表明,在厘米級距離以及多種檢測角度下,對多足機器人進行有效的體內跟蹤是可行的。這些研究為RFID技術在復雜生物環境中的應用提供了重要的實驗支持。

圖4. 多足機器人在不同距離、不同傾角、存在障礙物等情況下的定位追蹤
軟機器人在豬胃中的追蹤控制
鑒于多足機器人在人體應用時需覆蓋較長的操作距離,設計了一種適用于人體尺度的設備。采用大型磁控設備,可在距離離體豬胃15 cm的高度操控機器人。在這個實驗裝置中,當機器人在體內移動時,信號探測器接收來自RFID芯片的信號。根據信號范圍,可以獲得機器人的運動路徑,并且與上述磁場的運動路徑基本相同。此外,通過應用高頻交變磁場,在胃內特定位置成功實現了多足機器人的磁熱藥物釋放。
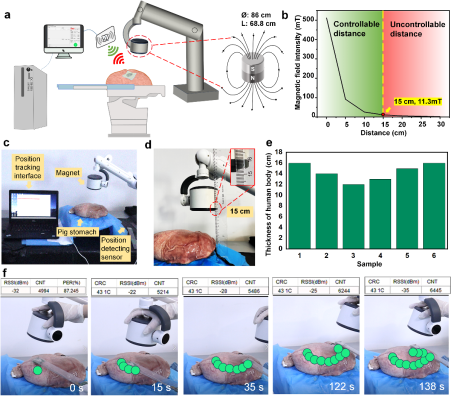
圖5. 多足機器人在磁場控制下的運動和追蹤
總結
本研究報告了一種結合液態金屬軟電子的多足機器人,其運動和感知功能通過磁性和射頻效應實現,可用于胃腸道中藥物遞送。在外部磁場的操控下,該機器人能夠執行多種運動模式,包括卷曲翻滾、浮起潛水和爬行等,同時其位置信息可通過RFID技術進行遠程讀取。此外,還通過高頻交變磁場成功實現了機器人搭載藥物的快速磁熱釋放。這種具有柔性和靈活性的微型機器人在實現精準醫療和最小化侵入性治療方面具有巨大應用潛力。
(來源 化學與環境工程學院)